tcp/ip
matlab
maven
区块链
IMX6ULL
SSM就业管理
AI绘画 神经网络
armv8
jQuery
民商法
编程
美食分享系统
gaussdb
栈
Lifecycle
JDK17.0.2
pthread
前置++和后置++
nullptr
clipStudioPaint
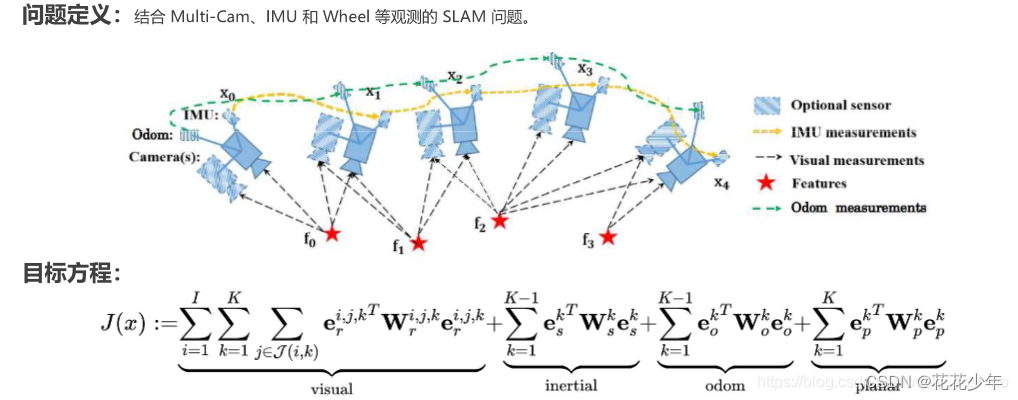
多传感器融合
2024/4/11 19:16:16
自动驾驶--定位技术
[整理自百度技术培训中心课程](https://bit.baidu.com/products?id70)
为什么无人车需要精确的定位系统 在地下车库实现自动泊车的一个非常关键的技术是什么呢?那就是定位技术。
为什么无人车需要一个精确的定位系统。为什么无人车需要精确的定位系统ÿ…
【AI视野·今日Robot 机器人论文速览 第七十六期】Fri, 12 Jan 2024
AI视野今日CS.Robotics 机器人学论文速览 Fri, 12 Jan 2024 Totally 12 papers 👉上期速览✈更多精彩请移步主页 Daily Robotics Papers
Topology-Driven Parallel Trajectory Optimization in Dynamic Environments Authors Oscar de Groot, Laura Ferranti, Dari…

多传感器融合定位十五-多传感器时空标定(综述)
多传感器融合定位十五-多传感器时空标定1. 多传感器标定简介1.1 标定内容及方法1.2 讲解思路2. 内参标定2.1 雷达内参标定2.2 IMU内参标定2.3 编码器内参标定2.4 相机内参标定3. 外参标定3.1 雷达和相机外参标定3.2 多雷达外参标定3.3 手眼标定3.4 融合中标定3.5 总结4. 时间标…

多传感器融合定位九-基于滤波的融合方法Ⅰ其一
多传感器融合定位九-基于滤波的融合方法Ⅰ其一1. 滤波器的作用2. 概率基础知识2.1 概率、概率密度2.2 联合概率密度2.3 条件概率密度2.4 贝叶斯公式2.5 贝叶斯推断2.6 高斯概率密度函数2.7 联合高斯概率密度函数2.8 高斯随机变量的线性分布1. 滤波器的作用
滤波器的本质&#…

ADAS多传感器后融合算法解析-上篇
ADAS多传感器后融合算法解析-上篇 附赠自动驾驶学习资料和量产经验:链接
ADAS系统是一种高自动化的软件应用,对系统的鲁棒性与可靠性要求很高,单一传感器往往存在一定限制,此时便需要多传感器融合。多传感器融合会带来如下收益&a…

视觉增强RTK论文(1)—— GNSS-Stereo-Inertial SLAM for Arable Farming
文章目录 摘要方法标记ORB-SLAM3GNSS-Stereo-Inertial融合实验结果代码摘要
农业任务自动化速度的加快要求现场机器人采用高精度和鲁棒的定位系统。同时定位和映射(SLAM)方法不可避免地会在探索性轨迹上积累漂移,并且主要依赖于位置重新访问和循环闭合来保持一个有界的全局…
多传感器融合SLAM --- 10.LIO-SAM前端代码分析 imuPreintegration.cpp
目录 0.流程图
1.main函数
2 IMU预积分类
2.1 代码详细注释
2.2 分块讲解--构造函数讲解
【自动驾驶系列丛书学习】2.《自动驾驶汽车环境感知》学习笔记
《自动驾驶技术概论》学习笔记 致谢:作者:甄先通、黄坚、王亮、夏添
--------------------------------------------------------------------------------------------------------
笔记目录 -----------------------------------------------------…
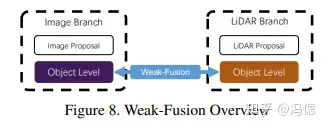
自动驾驶-如何进行多传感器的融合
自动驾驶-如何进行多传感器的融合 附赠自动驾驶学习资料和量产经验:链接
引言
自动驾驶中主要使用的感知传感器是摄像头和激光雷达,这两种模态的数据都可以进行目标检测和语义分割并用于自动驾驶中,但是如果只使用单一的传感器进行上述工作…
用ChatGPT学习多传感器融合中的基础知识
困惑与解答:
问题:匈牙利算法中的增广矩阵路径是什么意思
解答: 匈牙利算法是解决二分图最大匹配的经典算法之一。其中的增广矩阵路径指的是在当前匹配下,从一个未匹配节点开始,沿着交替路(交替路是指依次…
多传感器融合相关技术
重要说明:本文从网上资料整理而来,仅记录博主学习相关知识点的过程,侵删。
一、参考资料
多传感器融合定位学习 深蓝-多传感器定位融合 深蓝学院 多传感器融合定位 作业 多传感器融合详解
二、相关介绍
1. 毫米波雷达(Radar&a…
热释电矢量传感器设计
1 概述
使用4个热释电传感器组成一个2X2的矩阵。通过曲线的相位差、 峰峰值等特征量来计算相关信息。本文使用STM32单片机设计、制作了热释电传感器矩阵;使用C#.NET设计了上位机软件。为以上研究做了试验平台。
2 硬件电路设计
2.1 热释电传感器介绍 热释电红外…
多传感器分布式融合算法——多传感器网络协同目标跟踪和定位
多传感器分布式融合算法
应用:
多传感器网络协同目标跟踪及定位
原创不易,路过的各位大佬请点个赞
主要讲解算法: 多传感器集中式融合算法/分布式融合算法/序贯融合算法 多速率多传感器异步融合算法 多传感器…
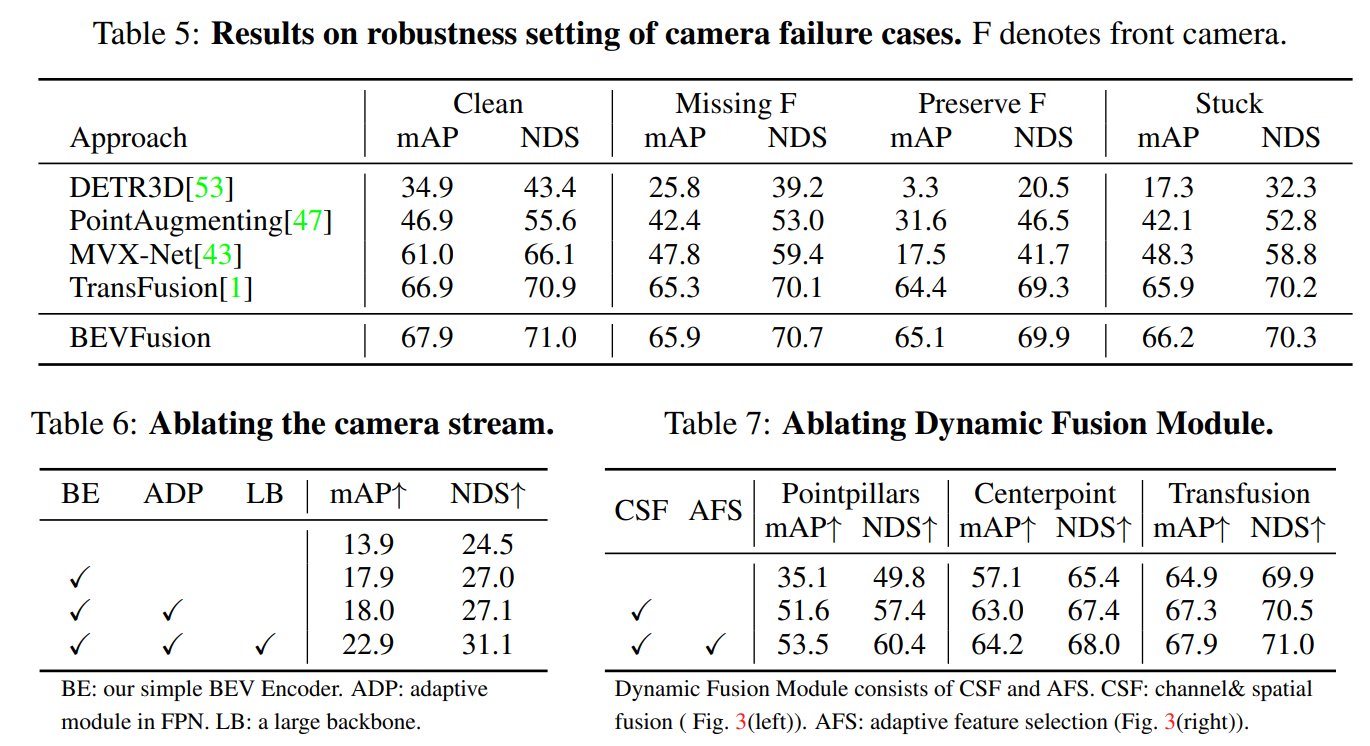
【多传感器融合】BEVFusion: 激光雷达和视觉融合框架 NeurIPS 2022
前言
BEVFusion其实有两篇,
【1】BEVFusion: A Simple and Robust LiDAR-Camera Fusion Framework. NeurIPS 2022 | 北大&阿里提出
【2】BEVFusion: Multi-Task Multi-Sensor Fusion with Unified Bird’s-Eye View Representation 2022 | MIT提出
本文先分…
五. 激光雷达建图和定位方案-引言
前面内容: 一. 器件选型心得(系统设计)--1_goldqiu的博客-CSDN博客
一. 器件选型心得(系统设计)--2_goldqiu的博客-CSDN博客
二. 多传感器时间同步方案(时序闭环)--1
三. 多传感器标定方案&a…
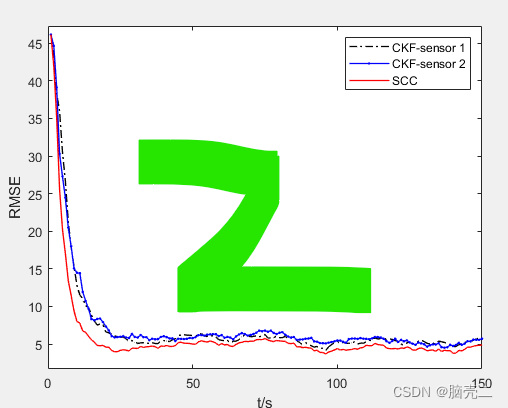
多传感器分布式融合算法——加权最小二乘WLS融合/简单凸组合SCC融合
加权最小二乘WLS融合/简单凸组合SCC融合——多传感器分布式融合算法
原创不易,路过的各位大佬请点个赞
主要讲解算法: 加权最小二乘融合WLS 简单凸组合融合SCC
应用于: 多传感器网络协同目标跟踪/定位/导航
联系WX: ZB823618313 目…